操作系统的结构
OS definition:A program that asts as an intermediary between a user of a computer an the computer hadware
操作系统的目标:
1) 使用户方便的使用计算机
2) 使计算机硬件高效率运行
硬件系统的组成:一个或者数个CPUS,加上一些控制设备,通过内部总线连接在一起,它们共享内存。这些CPUS和设备并行执行,并且竞争使用内存的访问周期。
计算机系统的四个层次:硬件(最底层)(cpu、内存、I/O) –> 操作系统 –> 应用程序 –> 用户(人、机器设备、网络上的其他计算机)
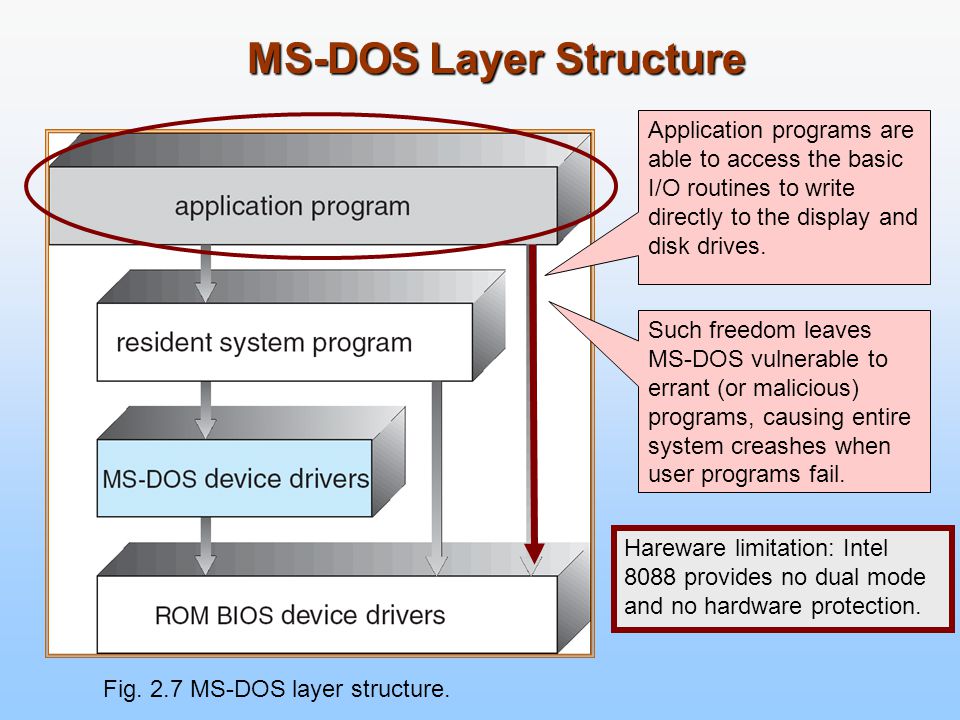
操作系统将硬件包裹起来,用户不可能去操作硬件,如果要访问硬件,必须使用系统调用(system call)
现代操作系统的特征
多程序(Multiprogramming),表示两个或者两个以上的程序能够驻留到内存空间中
多任务(Multitasking),分时系统(Timesharing),表示及时响应
CPU提供Dual-mode机制,实现OS的自我保护。CPU的 Mode bit或者类似的手段,可以在内核态和用户态之间进行切换
操作系统的结构
1) 简单结构。例如MS-OS的层次结构:
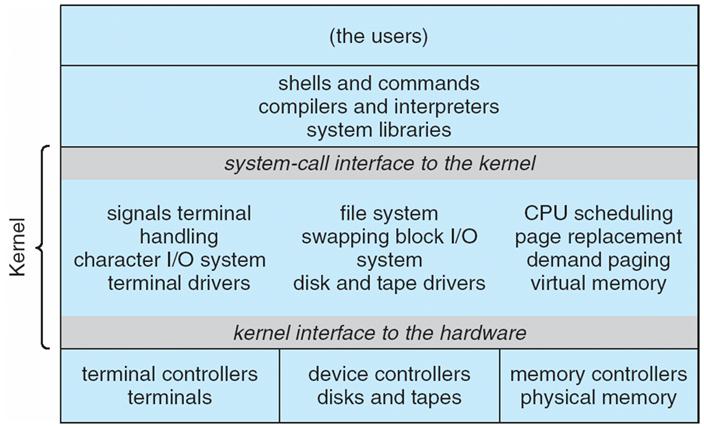
2) 层次化结构。例如Unix System Structure:
3) 微内核结构
4) 模块(Modules)
进程概念、操作与进程通信
所谓的进程:
1) different data with same program
2) different program with same data
进程是一个动态的概念,是有生命周期的
进程有三个维度:程序、数据、状态
Process:A program in execution
进程控制块(process control block)
PCB是一个非常复杂的数据结构
进程控制块是一个数据结构,通常与下列的信息相关联:
- process data
- program counter
- CPU register
- CPU scheduling information
- Memory-management information
- Accounting information
- I/O status information
进程控制块所保存的信息是对应同一个进程的,不同的进程共享的信息不放在进程控制块中
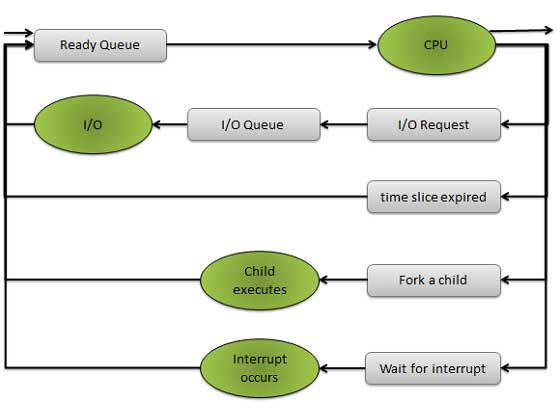
进程调度队列(Process scheduling queues)
程序的调度实际上是管理了许多程序调度队列
程序调度队列1
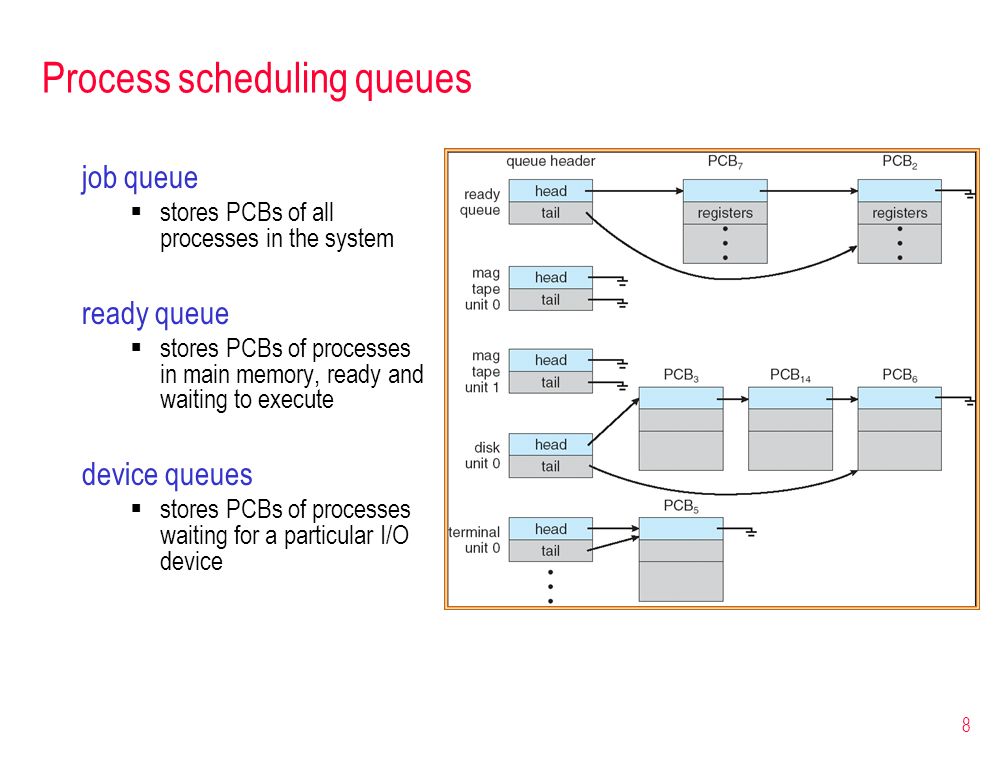
程序调度队列2
进程上下文切换(Contex Switch)
当CPU转向为另一个进程服务时,由于CPU内部的资源有限,它必须保存原有(转换前)进程的状态,进入待服务(转换后)进程状态,也即”进程上下文切换”
“状态”指寄存器、标志位、堆栈等当前值
上下文切换的时间是一种额外的开销(overhead),因为期间CPU不做对用户进程直接有益的事
上下文切换时间决定于CPU硬件的支持力度
CPU任何时候只能为一个进程服务
进程创建
父进程创建若干子进程;后者再创建子进程;以此类推,构成了反应传承关系的一颗进程树
子进程的资源根据操作系统设计的不同会有不同的方式
- 子进程共享父进程的所有资源
- 子进程共享父进程的部分资源
- 子进程不从父进程共享资源,重新独立申请
执行代码的执行顺序也分为不同的情况:
- 父进程和子进程并发执行
- 父进程在子进程执行期间等待,待子进程执行完毕后才恢复执行余下代码
地址空间中的image
- 子进程复制了(duplicate NOT copy)父进程的image
- 子进程全新装入一个程序,得到了不同于父进程的image
Unix环境下fork一个进程
int main()
{
Pid_t pid;//在子进程并没有执行
/- fork another process */
pid = fork();//系统调用,创建子进程;在Linux中子进程完全继承类父进程的一切,返回用户态之后,子进程和父进程是完全相同的两个进程(除了ID号);父进程返回PID号,子进程返回0
if (pid < 0) { /- error occurred */
fprintf(stderr, "Fork Failed");
exit(-1);
}
else if (pid == 0) { /- child process */
execlp("/bin/ls", "ls", NULL);
}
else { /- parent process */
/- parent will wait for the child to complete */
wait (NULL);//等待子进程完成之后再进行
printf ("Child Complete");
exit(0);
}
}
进程终止表示语义一:子进程执行完最后一条指令后,要求操作系统将自己杀出(exit),语义动作包括:
- 子进程传递数据给父进程(通过父进程的wait操作)
- 子进程的资源被操作系统收回
进程终止表示语义二:父进程终止子进程的执行(abort)
进程合作
独立:进程不会影响其他进程的执行,也不被影响
合作:进程影响其他进程,或者受其影响
进程合作好处:共享信息、加速(计算)执行任务、模块化、方便调用…
进程间通信
进程通信(Interprocess Communication, IPC),消息系统是进程之间通信比较常用的一种方式。
同步通信
- 发送操作Send,发送进程等待,直到接受进程确认收到消息
- 接受操作receive,接收进程表等待,直至有个消息到达
异步通信
- 发送操作send,发送进程发出消息后即返回,该干什么干什么,不理会消息是否会到达
- 接受操作receive,接收进程执行一次接收动作后,要么收到一条有效消息,要么收到空消息
线程
进程:程序的一次执行,有独立的内存空间
线程:CPU调度的最小单元,和其他线程共享内存空间
CPU调度
CPU调度器(scheduler)的使命:
- 从内存中一堆准备就绪的进程中(就绪队列总的就绪进程),选取一个进程
- 将CPU分配给该进程
CPU调度的操作时机:
- 某一个进程从执行状态转为等待状态(非抢占式)
- 某一个进程从执行状态转为就绪状态(抢占式)
- 某一个进程从等待状态转为就绪状态(抢占式)
- 某一个进程的终止(非抢占式)
…
所谓的非抢占式(nonpreemptive)是进程自愿交出CPU资源,这种调度称之为非抢占式调度;所谓的抢占式(preemptive)是非自愿的交出CPU资源,这种调度称之为抢占式调度
CPU调度器决定了将CPU分配给谁。后续的操作就是,CPU分配器将CPU控制权交给该进程,操作内容:
- 上下文切换(switching contex)
- 从内核态(kernel mode)转到用户态(user mode)
- 跳转至用户程序中PC寄存器所指示的位置
分配延迟(Dispatch latency):CPU分配器暂停前一个进程,启动后一个进程所经历的时间
CPU调度算法
FCFS调度算法,先来先服务算法。这种算法的启示:短进程先于长进程,会得到意想不到的效果
SJF,Shortest-Job-First调度算法。SJF算法分为抢占式和非抢占式,非抢占式表示一旦CPU分配给某个进程,其他进程就不能够抢过来,而抢占式是可以抢过来CPU的,又叫做Shortest-Remaining-Time-First(SRTF)
SJF算法的前提是:CPU要获得进程的预运行时间,而程序的预运行时间是无法预先准确的判断出来的,这是SJF算法的致命的缺陷。
HRN算法,Highest response Ration Next。HRN=(W + T)/T,W代表是等待的时间,T代表预估CPU的时间
优先权法(Priority Scheduling):
每一个进程都有一个优先数(priority number),通常是一个整形数,选取就绪队列中,优先权最高的进程具有最高的优先权。优先权法也同样分为抢占式和非抢占式的
轮转法(Round Robin, RR):
每一个就绪进程获得一小段CPU时间(时间片,time quantum),通常10ms-100ms。时间片用完毕,这个进程别破交出CPU,重新回到就绪队列,重新参与竞争。
多层队列(Multilevel Queue)
多层队列是把就绪队列分成几个队列,例如:
- 要求交互的进程,放在前台队列,使用RR轮转调度算法
- 可以批量处理的进程,,放在后台队列,使用FCFS调度算法
进程同步
进程同步之临界区问题
常识:
- 对共享数据(Shared Data)的并发访问(Concurrent Access),可能导致数据不一致问题
- 确保数据的一致性(Data Consistency),是一个合理的要求。它需要一种机制,以保证合作进程有序进行
- 原子操作(Atomic operation)要求该操作完整地一次性完成,不允许中间被打断。
- 汇编指令执行一次任务是不会被中断的(i386cpu)
Race Condition(竞争):The situation where serveral processes acess and manipulate shared data concurrenctly. The final value of the shared data depends upon which process finishes last.
解决竞争问题的方法,并发进程必须使用同步(synchronize)
临界区问题(The critical-section prblem),是n个进程中至少一个以上的进程修改了共享数据,才构成临界区问题。临界区指的是代码。我们想要的是:任何时候只有一个进程在其临界区执行。
临界区问题解决方案必须满足3个条件:
- 互斥(Mutual Exclusion),如果一个进程正在其临界区执行,那么其他任何进程不允许在他们的临界区执行
- 空闲让进(Process),如果没有进程处于它的临界区,并且某些进程申请进入临界区,那么,只有个那些不在Remainder section的进程,才能参与是否进入临界区的选举,并且这个选举不允许被无限期的推迟。
- 有限等待(Bounded Waiting),某一个进程从其提出申请,至它获准进入他们的临界区这段时间里,其他进程进入他们临界区的次数存在上界。
临界区软件实现算法
算法1(二进程)
i进程
do {
while (turn != i) ;
critical section
turn = j;
remainder section
} while (1);
j进程
do {
while (turn != j) ;
critical section
turn = i;
remainder section
} while (1);
算法1满足Mutual Exclusion,但是不满足Process,所以算法不能用来处理临界区问题
算法2(二进程)
i进程
do {
flag[i] = true;
while (flag[j]) ;
critical section
flag [i] = false;
remainder section
} while (1);
j进程
do {
flag[j] = true;
while (flag[i]) ;
critical section //临界区
flag [j] = false;
remainder section
} while (1);
算法2同样只满足Mutual Exclusion,但是不满足Process,故不能用来处理临界区问题
Peterson算法(二进程)
i进程
while (true) {
flag[i] = TRUE;
turn = j;
while ( flag[j] && turn == j);
CRITICAL SECTION
flag[i] = FALSE;
REMAINDER SECTION
}
j进程
while (true) {
flag[j] = TRUE;
turn = i;
while ( flag[i] && turn == i);
CRITICAL SECTION
flag[j] = FALSE;
REMAINDER SECTION
}
Peterson可以用来处理二进程的临界区问题
面包房算法(Bakery,处理N个进程临界区问题)
do{
choosing[i] = true ;
number[i] = max(number[0],number[i],...,number[n-1]) + 1 ;
choosing[i] = false ;
for(j=0; j<n; j++){
while(choosing[j]) ;
while((number[j] != 0) && ((number[j], j) < (number[i], i))) ;
}
critical section
number[i] = 0 ;
remainder section
}while(1) ;
临界区问题的硬件指令解决方案
提供硬件指令来解决临界区问题
信号量(Semaphore)
信号量可以解决无限多进程的临界区问题
Semaphore S; // 初始值为 1
do{
wait (S);
Critical Section;
signal (S);
remainder section;
} while(1);
虚拟存储思想
- 逻辑空间可以独立于物理空间
- 进程只需要一小部分代码(请求CPU执行的部分代码)驻留内存
- 进程的逻辑空间可以远远大于(分配给它的)物理空间
- 于是,物理空间被更多的进程共享
